
Nieuws
AI trainen met 3D-vissen: bouwstenen voor automatisering van de visserij
Over een aantal jaren hebben kotters en trawlers een camera en robot aan boord. Ontwikkeld met behulp van synthetische data en machine learning. Onderzoeker Arjan Vroegop over automatisering van de visserij, game engines, Masenro 3 en hoe je vissen kunt tellen zonder die allemaal te zien.
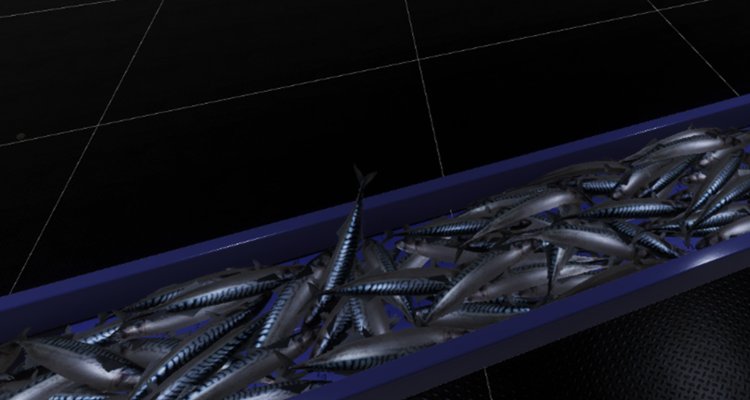
Schollen vallen kriskras naar beneden op een lopende band waarop ook stenen, schelpen en andere vissen liggen. Floep, daar duikelt weer een vis over het computerscherm. Dan valt een schelp uit de lucht en nog een, en dan zie je nog meer vissen over elkaar tuimelen en struikelen. Achter de knoppen van de simulatie zit onderzoeker van WUR-programma Vision+Robotics, Arjan Vroegop. “We zijn bezig met synthetische data een robot ‘op te leiden’ zodat hij onder meer het verschil kan leren tussen een schol en bijvangst.”
Vroegop heeft de simulatie gemaakt met zijn collega’s van WANDER lab. Een WUR-groep die zich richt op virtual en augmented reality. Zij hebben 3D vissen gemaakt voor een virtuele omgeving. Kijk, daar komen op zijn beeldscherm weer een paar schollen op de lopende band voorbij. Vroegop: “Die band beweegt langs een camera. Op deze manier kun je het handmatig annoteren van data automatiseren. Met als doel de robot te leren welke vissoorten hij ziet, ook als die slecht of niet zichtbaar zijn.”
- Helaas, uw cookie-instellingen zijn zodanig dat de video niet getoond kan worden - pas uw permissie voor cookies aan