
Student information
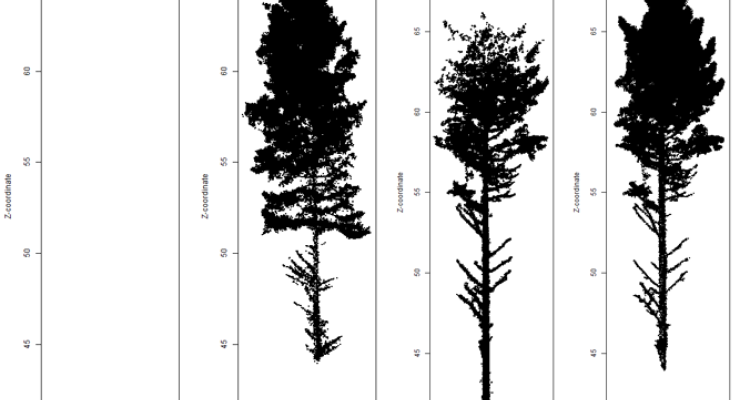
MSc thesis topic: Matching tree pointclouds from different LiDAR systems based on their tree structure
Light detection and ranging (LiDAR) has been proposed as a suitable technique for mapping forest. A number of parameters can be derived from these 3D maps such as tree height, diameter at breast height (DBH), and even tree volume providing an objective, practical and cost-effective solution for forest inventories.
LiDAR can be operated in airborne configuration (Airborne laser scanning (ALS) or in a terrestrial setup (TLS). TLS measures forests from below canopy and offers a much more detailed description of the individual trees and stands. In addition to this, traditional forest inventory also provide complement information about the forest, however, some measurements are subject to the instrument’s accuracy and the expert’s experience. These factors create uncertainty over the measured value. TLS can provide another, more detailed, value, which can improve the inventory.
For this research project, a we provide the basic script for matching tree pointclouds (in R), and two datasets: an UAV and TLS tree pointcloud datasets, co-registered and with segmented trees.
Objectives and Research questions
- Understand the importance of a good quality alignment of trees for tree inventory based on different LiDAR systems.
- Compare individual tree pointclouds from different LiDAR systems based on their tree characteristics.
- Improve an existing algorithm to match tree pointclouds from different LiDAR systems based on the location and provide with (un)certainties based on their tree parameters.
Requirements
- Basic understanding of LIDAR technology and their use in forests
- Programming skills (R)
Literature and information
- Simonse, M., Aschoff, T., Spiecker, H., & Thies, M. (2003, September). Automatic determination of forest inventory parameters using terrestrial laser scanning. In Proceedings of the scandlaser scientific workshop on airborne laser scanning of forests (Vol. 2003, pp. 252-258).
- Bienert, A., Maas, H. G., & Scheller, S. (2006, February). Analysis of the information content of terrestrial laserscanner point clouds for the automatic determination of forest inventory parameters. In Workshop on 3D Remote Sensing in Forestry (Vol. 14, p. 15th).
- Joseph Mascaro, Matteo Detto, Gregory P. Asner, Helene C. Muller-Landau, Evaluating uncertainty in mapping forest carbon with airborne LiDAR, Remote Sensing of Environment.
- Pascual, A.; Guerra-Hernández, J.; Cosenza, D.N.; Sandoval, V. The Role of Improved Ground Positioning and Forest Structural Complexity When Performing Forest Inventory Using Airborne Laser Scanning. Remote Sens. 2020, 12, 413.
- Saarela, S., Wästlund, A., Holmström, E. et al. Mapping aboveground biomass and its prediction uncertainty using LiDAR and field data, accounting for tree-level allometric and LiDAR model errors. For. Ecosyst. 7, 43 (2020).
- Hooman Latifi, Fabian E. Fassnacht, Jörg Müller, Agalya Tharani, Stefan Dech, Marco Heurich, Forest inventories by LiDAR data: A comparison of single tree segmentation and metric-based methods for inventories of a heterogeneous temperate forest, International Journal of Applied Earth Observation and Geoinformation.
- Hill, A.; Breschan, J.; Mandallaz, D. Accuracy Assessment of Timber Volume Maps Using Forest Inventory Data and LiDAR Canopy Height Models. Forests 2014, 5, 2253-2275.
Expected reading list before starting the thesis research
- Choose at least 5 research papers from the literature list above.
Theme (s): Modelling & visualisation